1 运动控制
运动控制系统处理机械系统中一个或多个坐标上的运动以及运动之间的协调,实现精确的位置控制、速度和加速度控制、转矩和力的控制等。
单轴的运动控制系统可分为开环、半闭环和闭环伺服系统。
多轴运动控制系统可以分成点位控制、连续轨迹控制和同步控制。
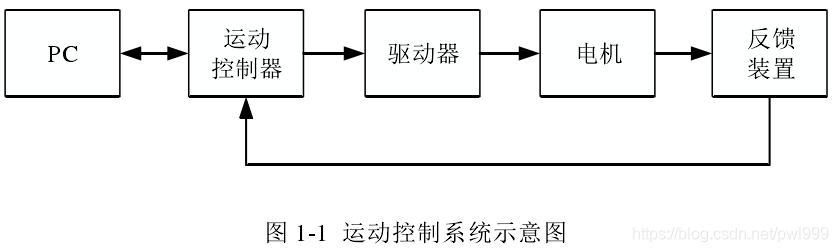
典型的运动控制系统,从结构上看,包括上位机控制窗口、运动控制器、驱动器、电机以及测量反馈系统等几个部分组成:
2 实时以太网
实时以太网(RTE, Real Time Ethernet)是常规以太网技术的延伸,以便满足工业控制领域的实时性数据通信要求。目前,国际上有多种实时工业以太网协议,根据不同的实时性和成本的要求使用不同的原理,大致可以分为以下三类:
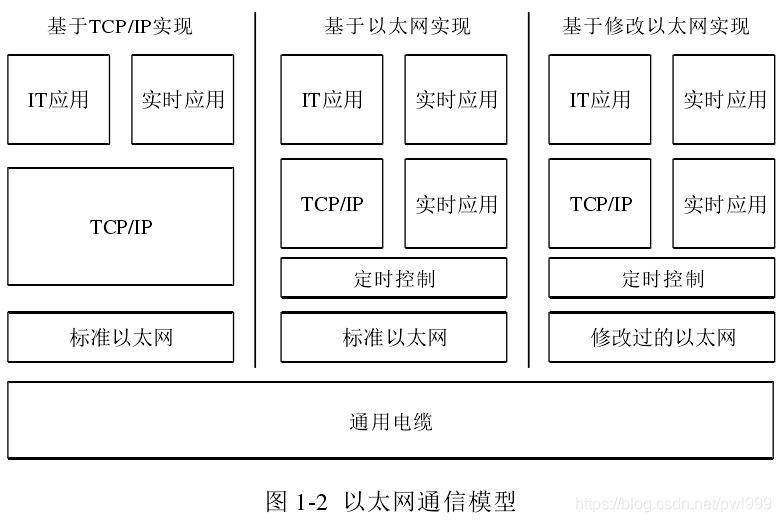
- 基于TCP/IP实现的工业以太网仍使用TCP/IP协议栈,通过上层合理的控制来解决通信过程中的不确定因素。这种方式具有较高的传输速率,适应于大量数据通信,更适合作为网关和交换设备的应用,不能实现很好的实时性。常用的通信控制方法有:合理调度,减少冲突的概率;定义帧数据的优先级,为实时数据分配最高优先级;使用交换式以太网等。使用这种方式的典型协议有Modbus/TCP和Ethernet/IP等。
- 基于以太网实现的工业以太网仍然使用标准的、未修改的以太网通信硬件,但是不适用TCP/IP来传输数据。它使用特定的报文进行传输。TCP/IP协议栈能使用时间控制层分发一定的时间片来利用网络资源。该类协议主要有Ethernet Powerlink, EPA C Ethernet for Plant Automation ), PROFINET IRT等。通过这种方式可以实现较好的实时性。
- 通过修改以太网协议实现的工业以太网,实现应答时间小于lms的硬实时,从站使用特定的硬件实现。由实时MAC控制实时通道内的通信,从根本上避免报文间的冲突。非实时数据依然能在通道中按原协议通信。典型协议有德国倍福的EtherCAT、西门子的PROFINET IRT等。
3 EtherCAT
德国BECKHOFF自动化公司于2003年开发出的EtherCAT实时以太网技术突破了其他以太网解决方案的系统限制:通过该项技术,无需接受以太网数据包,将之解码,然后再将过程数据复制到各个设备。